PyTorch深度学习快速入门教程
1.环境安装
环境安装参考[2]第一节,可以基本解决可能遇到的环境安装问题
2.Pytorch数据加载
重写Dataset函数里的__getitem__()和__len__()函数
#!/usr/bin/venv python
# -*- coding:utf-8 -*-
# @Author :LiJie
# @Time :2024/7/12 上午12:34
# @Filename :test.py
from torch.utils.data import Dataset, DataLoader
from PIL import Image
import os
class MyData(Dataset):
def __init__(self, root_dir, label_dir):
self.root_dir = root_dir
self.label_dir = label_dir
self.path = os.path.join(self.root_dir, self.label_dir)
self.img_path = os.listdir(self.path)
def __getitem__(self, idx):
img_name = self.img_path[idx]
img_item_path = os.path.join(self.path, img_name)
img = Image.open(img_item_path)
label = self.label_dir
return img, label
def __len__(self):
return len(self.img_path)
root_dir = "dataset/train"
ants_label_dir = "ants"
ants_dataset = MyData(root_dir, ants_label_dir)
img, label = ants_dataset[0]
img.show()3.TensorBoard使用
3.1 TensorBoard安装以及可能遇到的问题
TensorBoard可以将代码运行过程可视化,是一个非常不错的辅助工具
TensorBoard没有默认安装,在conda虚拟环境中输入安装指令
pip install tensorboard在终端运行Tensorboard
# --logdir指定日志目录
tensorboard --logdir=logs
# --port 可以指定端口(默认端口6006)
tensorboard --logdir=logs --port==6007在使用Tensorboard,可能会遇到numpy版本过高问题,将numpy降级即可
问题显示情况: “AttributeError: np.string_ was removed in the NumPy 2.0 release. Use `np.bytes”
pip uninstalll numpy
pip install numpy==1.23.0其他可能出现的问题:
tensorboard出现TensorFlow installation not found - running with reduced feature set
解决办法,改用绝对路径
tensorboard --logdir="D:\PycharmProjects\PyTorch\another_practice\CIFAR10"3.2 TensorBoard使用
演示代码
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter("logs")
# writer.add_image()
# y = 2x
for i in range(100):
writer.add_scalar("y=2x", 2*i, i) #此函数一般使用三个参数:标题title y轴 x轴
writer.close()此处=会遇到另一个问题,title没改改变x轴和y轴参数,图像会被写到一个图片里,tensorboard在拟合函数图像时会导致图片混乱,决绝办法是将日志文件夹的文件删除
from torch.utils.tensorboard import SummaryWriter
import numpy as np
from PIL import Image
img_path = "data/train/bees_image/16838648_415acd9e3f.jpg"
img_PIL = Image.open(img_path)
img_array = np.array(img_PIL)
print(img_array.shape)
writer = SummaryWriter("logs")
writer.add_image("test", img_array, 2, dataformats='HWC') #注意img_array代表格式,以及dataformats默认格式为'CHW'
# y = 2x
for i in range(100):
writer.add_scalar("y=2x", 2*i, i)
writer.close()4.Transformer的使用
Transforms是一个深度学习类函数包
常用的有:transforms.ToTensor() 将数据转为tensor类型
transforms.Normalize() 数据标准化
transforms.Resize( sequnce or int ) 大小转换
transforms.Compose([transforms变量1,transforms变量2, ... ]) 前一变量输出作为下一变量输入
# 常见的Transforms
from torchvision import transforms
from PIL import Image
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter('logs')
img_path = "data/train/ants_image/0013035.jpg"
img = Image.open(img_path)
# ToTensor的使用
trans_totensr = transforms.ToTensor()
img_tensor = trans_totensr(img)
writer.add_image("ToTensor", img_tensor)
# Normalize
print(img_tensor.shape)
print(img_tensor[0][0][0])
trans_norm = transforms.Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5])
img_norm = trans_norm(img_tensor)
print(img_norm[0][0][0])
writer.add_image("Normalize", img_norm)
# Resize
print(img.size)
trans_resize = transforms.Resize((512, 512))
# img PIL -> resize -> img_resize PIL
img_resize = trans_resize(img)
# img_resize PIL -> ToTensor -> img_resize tensor
img_resize_totensor = trans_totensr(img_resize)
writer.add_image("Resize", img_resize_totensor, 0)
print(img_resize)
# Compose - resize - 2 另一种Resize的方法
trans_resize_2 = transforms.Resize(512)
trans_compose = transforms.Compose([trans_resize, transforms.ToTensor()])
img_resize_2 = trans_compose(img)
writer.add_image("Resize", img_resize_2, 1)
writer.close()5.torchvision数据集
可以从函数声明找到下载链接,在迅雷下载数据集,将压缩包下载到root目录,download依然设置为True,代码运行时会自动解压并verify
import torchvision
from torch.utils.tensorboard import SummaryWriter
from torchvision.transforms import transforms
dataset_transform = transforms.Compose([
transforms.ToTensor(),
])
train_set = torchvision.datasets.CIFAR10(root='./data2', train=True, transform=dataset_transform, download=True)
test_set = torchvision.datasets.CIFAR10(root='./data2', train=False, transform=dataset_transform, download=True)
writer = SummaryWriter(log_dir='p11')
for i in range(10):
img, target = test_set[i]
writer.add_image('test_set', img, i)
writer.close()
6.Dataloader使用
从dataset中取数据
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
test_set = torchvision.datasets.CIFAR10(root='./data2', train=False, transform=torchvision.transforms.ToTensor())
# shuffle为true时,每次循环的抽取次序不一样,false则一样
# drop_last是除以batch_size后剩余的数据,是否保存,False保存,True不保存
# num_workers 多线程
test_loader = DataLoader(dataset=test_set, batch_size=64, shuffle=True, num_workers=0, drop_last=False)
print(test_loader)
img, target = test_set[0]
print(img.shape)
print(target)
i = 0
writer = SummaryWriter(log_dir='dataloader')
step = 0
for data in test_loader:
i += 1
print(f"==========={i}===================")
imgs, targets = data
# print(imgs.shape)
# print(targets.shape)
writer.add_images('test_set', imgs, step)
step += 1
writer.close()7.nn.Module的使用
eg.
import torch.nn as nn
import torch.nn.functional as F
class Model(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 20, 5)
self.conv2 = nn.Conv2d(20, 20, 5)
def forward(self, x):
x = F.relu(self.conv1(x))
return F.relu(self.conv2(x))
8.nn_conv卷积函数
torch.nn.functional.conv2d(input, weight, bias=None, stride=1, padding=0, dilation=1, groups=1)
input为一个四维的tensor数据:input – input tensor of shape (minibatch,in_channels,𝑖𝐻,𝑖𝑊)(minibatch,in_channels,*i*H,iW)
import torch.nn.functional as F
import torch
input = torch.tensor([[1, 2, 0, 3, 1],
[0, 1, 2, 3, 1],
[1, 2, 1, 0, 0],
[5, 2, 3, 1, 1],
[2, 1, 0, 1, 1]])
kernal = torch.tensor([[1, 2, 1],
[0, 1, 0],
[2, 1, 0]])
# print(input.shape)
# print(kernal.shape)
input = torch.reshape(input, [1, 1, 5, 5])
kernal = torch.reshape(kernal, [1, 1, 3, 3])
output = F.conv2d(input, kernal, stride=1, padding=0)
print(output)
output2 = F.conv2d(input, kernal, stride=2, padding=0)
print(output2)9.nn_Conv2d
注意输入输出层之间的HWC的计算
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv1 = Conv2d(3, 6, kernel_size=3, stride=1, padding=0)
def forward(self, x):
x = self.conv1(x)
return x
tudui = Tudui()
print(tudui)
for data in dataloader:
imgs, targets = data
output = tudui(imgs)
print(output.shape)
10.最大池化 MaxPool2d
减少数据同时保留特征;注意ceil=True,池化时即使核无法完全覆盖,也正常取值
import torch
import torchvision
from torch import nn
from torch.nn import MaxPool2d
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)
input = torch.tensor([[1, 2, 0, 3, 1],
[0, 1, 2, 3, 1],
[1, 2, 1, 0, 0],
[5, 2, 3, 1, 1],
[2, 1, 0, 1, 1]], dtype=torch.float32)
input = torch.reshape(input, (-1, 1, 5, 5))
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.maxpool1 = MaxPool2d(kernel_size=3, ceil_mode=False)
def forward(self, input):
output = self.maxpool1(input)
return output
tudui = Tudui()
# output = tudui(input)
# print(output)
writer = SummaryWriter(log_dir='../logs_maxpool')
step = 0
for data in dataloader:
imgs, targets = data
writer.add_images('input', imgs, step)
output = tudui(imgs)
writer.add_images("output", output, step)
step += 1
writer.close()
-
Input: (𝑁,𝐶𝑖𝑛,𝐻𝑖𝑛,𝑊𝑖𝑛)(N,*Cin,Hin,Win) or (𝐶𝑖𝑛,𝐻𝑖𝑛,𝑊𝑖𝑛)(Cin,Hin,Win*)
-
Output: (𝑁,𝐶𝑜𝑢𝑡,𝐻𝑜𝑢𝑡,𝑊𝑜𝑢𝑡)(N,*Cout,Hout,Wout) or (𝐶𝑜𝑢𝑡,𝐻𝑜𝑢𝑡,𝑊𝑜𝑢𝑡)(Cout,Hout,Wout*), where
𝐻𝑜𝑢𝑡=⌊𝐻𝑖𝑛+2×padding[0]−dilation[0]×(kernel_size[0]−1)−1stride[0]+1⌋*Hout=⌊stride[0]Hin*+2×padding[0]−dilation[0]×(kernel_size[0]−1)−1+1⌋
𝑊𝑜𝑢𝑡=⌊𝑊𝑖𝑛+2×padding1−dilation1×(kernel_size1−1)−1stride1+1⌋*Wout=⌊stride1Win*+2×padding1−dilation1×(kernel_size1−1)−1+1⌋
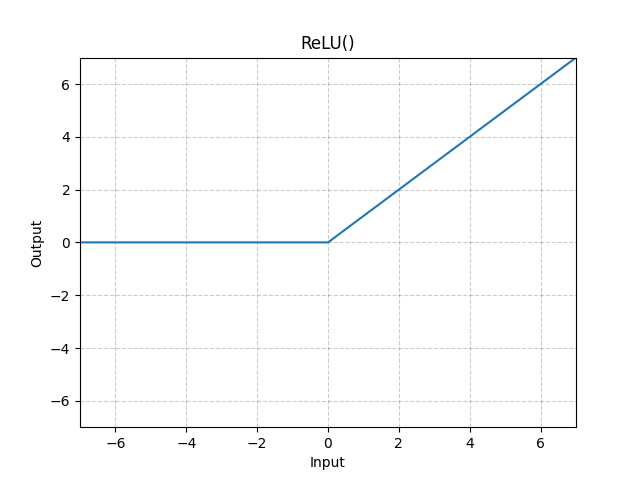
11.非线性激活
nn.ReLu() inplace 参数,为True时会将输入的值做相应改变,默认为False
$$
ReLu(x)=(x)^+max(0,x)
$$
import torch
import torch.nn as nn
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
# self.relu = nn.ReLU()
self.sigmoid = nn.Sigmoid()
def forward(self, input):
output = self.sigmoid(input)
return output
tudui = Tudui()
writer = SummaryWriter(log_dir='../logs_sigmod')
step = 0
for data in dataloader:
imgs, targets = data
writer.add_images('input', imgs, step)
output = tudui(imgs)
writer.add_images("output_sigmoid", output, step)
step += 1
writer.close()12.线性层(torch.nn.Linear)
线性层又叫全连接层,其中每个神经元与上一层所有神经元相连,一个简单的线性层如下图所示:

线性函数为:torch.nn.Linear(in_features, out_features, bias=True, device=None, dtype=None),其中重要的3个参数in_features、out_features、bias说明如下:
in_features:每个输入(x)样本的特征的大小
out_features:每个输出(y)样本的特征的大小
bias:如果设置为False,则图层不会学习附加偏差。默认值是True,表示增加学习偏置。
在上图中,in_features=d,out_features=L。
作用可以是缩小一维的数据长度
下面代码中注意drop_last设置为true,否则会报错。
torch.flatten展平,可用torch.view(),torch.reshape(-1)代替
import torch
import torchvision
from torch import nn
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(),
download=True)
img_data = DataLoader(dataset=dataset, batch_size=64, drop_last=True)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.linear1 = nn.Linear(in_features=196608, out_features=10)
def forward(self, x):
x = self.linear1(x)
return x
tudui = Tudui()
for data in img_data:
imgs, targets = data
print(imgs.shape)
imgs_flatten = torch.flatten(imgs)
print(imgs_flatten.shape)
linear_out = tudui(imgs_flatten)
print(linear_out.shape)
13.Sequntial
Sequntial将网络各部分包装成一个model
import torch
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Linear, Flatten
from torch.utils.tensorboard import SummaryWriter
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
tudui = Tudui()
print(tudui)
input = torch.ones((64, 3, 32, 32))
output = tudui(input)
print(output.shape)
writer = SummaryWriter('../logs_seq')
writer.add_graph(tudui, input)
writer.close()
14.损失函数与反向传播
loss test
"""
@Author: LiJie
@FileName: nn_loss.py
@DateTime: 2024/7/15 下午7:33
"""
from torch.nn import L1Loss, MSELoss, CrossEntropyLoss
import torch
x1 = torch.tensor([1, 2, 3], dtype=torch.float32)
y1 = torch.tensor([1, 2, 5], dtype=torch.float32)
# L1loss
loss1 = L1Loss()
loss_l1 = loss1(x1, y1)
print(f"loss_l1 = {loss_l1}")
# MSELoss
loss2 = MSELoss()
loss_mse = loss2(x1, y1)
print(f"loss_mse = {loss_mse}")
# CrossEntryLoss
loss3 = CrossEntropyLoss()
x2 = torch.tensor([0.1, 0.2, 0.3], dtype=torch.float32)
print(x2.shape)
x2 = torch.reshape(x2, [1, 3])
y2 = torch.tensor([1])
loss_crossrentry = loss3(x2, y2)
print(f"loss_crossrentry = {loss_crossrentry}")loss + backword
"""
@Author: LiJie
@FileName: nn_network_loss.py
@DateTime: 2024/7/15 下午8:19
"""
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Linear, Flatten
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(),
download=True)
dataloader = DataLoader(dataset, batch_size=1)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss()
tudui = Tudui()
step = 1
for data in dataloader:
imgs, targets = data
output = tudui(imgs)
result_loss = loss(output, targets)
result_loss.backward()
print(step)
step += 1
15.优化器 torch.optim
1、过程描述
继上节的计算损失函数和反向传播,
之后便是根据损失值,利用优化器进行梯度更新,然后不断降低loss的过程
一般要对数据集扫描多遍,进行参数的多次更新,才能得到一个较好的效果。
注意,每次更新后要将梯度置0,然后重新计算梯度注意,每次更新后要将梯度置0,然后重新计算梯度
2、常用优化器:
优化器的种类比较多,常用的就是随机梯度下降(SGD) 等
不同的优化器的参数列表一般不同,但都会有 params(模型的参数列表)和lr(学习率)参数,
eg.
"""
@Author: LiJie
@FileName: nn_optim.py
@DateTime: 2024/7/15 下午8:50
"""
import torch
import torchvision
from torch import nn
from torch.nn import Conv2d, MaxPool2d, Linear, Flatten
from torch.utils.data import DataLoader
dataset = torchvision.datasets.CIFAR10(root='../data2', train=False, transform=torchvision.transforms.ToTensor(),
download=True)
dataloader = DataLoader(dataset, batch_size=1)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model1 = nn.Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model1(x)
return x
loss = nn.CrossEntropyLoss()
tudui = Tudui()
optim = torch.optim.SGD(tudui.parameters(), lr=0.01)
step = 1
for epoch in range(10):
loss_sum = 0.0
for data in dataloader:
imgs, targets = data
output = tudui(imgs)
result_loss = loss(output, targets)
optim.zero_grad()
result_loss.backward()
optim.step()
loss_sum += result_loss
print('epoch:', epoch, 'loss:', loss_sum)16.VGG16
使用torchvision.models.vgg16模型,新版vgg16用weights代替pretrain参数,weights=None代表没有预训练,另外参数有weights='IMAGENET1K_V1' 或者 weights='IMAGENET1K_FEATRUES' (这里出现一个问题,官方文档说DEFAULT等价于IMAGENET1K_V1,但是代码文件介绍写DEFALUT等于没有预训练,实际运行代码说明官方文档是对的。。。。)
模型下载可能会很慢,下载时会显示下载链接,可复制到迅雷下载,再放到下载目录(下载目录运行的时候会显示)下载目录为: C:\Users\用户名.cache\torch\hub\checkpoints
然后是vgg预训练模型下载位置的修改,待填坑
vgg模型的结构修改,也叫模型迁移,三种修改,代码:
"""
@Author: LiJie
@FileName: nn_VGG16.py
@DateTime: 2024/7/16 下午3:18
"""
import torchvision
from torch import nn
vgg16_false = torchvision.models.vgg16(weights=None)
vgg16_true = torchvision.models.vgg16(weights='IMAGENET1K_V1')
print("vgg16原始模型结构")
print(vgg16_false)
print(vgg16_true)
# 在最外层添加一个线性层
print("vgg16在最外层添加一个线性层")
vgg16_true.add_module('add_linear', nn.Linear(in_features=1000, out_features=10))
print(vgg16_true)
# 在classifier添加一个线性层
print("vgg16在classifier添加一个线性层")
vgg16_false.classifier.add_module('add_linear', nn.Linear(in_features=1000, out_features=10))
print(vgg16_false)
# 将classifier的第6层修改
print("vgg16 classifier第6层修改")
vgg16_true.classifier[6] = nn.Linear(in_features=1000, out_features=10)
print(vgg16_true)
17.模型的保存与读取
module_save.py
"""
@Author: LiJie
@FileName: module_save.py
@DateTime: 2024/7/16 下午4:28
"""
import torch
import torchvision
from torch import nn
vgg16 = torchvision.models.vgg16(weights=None)
# 保存方式1,模型结构+参数
torch.save(vgg16, "vgg16_method1.pth")
# 保存方式2,模型参数(官方推荐)
torch.save(vgg16.state_dict(), "vgg16_method2.pth")
# 方式1的陷阱
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, padding=1)
def forward(self, x):
x = self.conv1(x)
return x
tudui = Tudui()
torch.save(tudui, "Tudui_method1.pth")module_load.py
使用方式1保存自己的模型,再加载时,需要import源代码,否则会报错
"""
@Author: LiJie
@FileName: module_load.py
@DateTime: 2024/7/16 下午4:31
"""
import torch
import torchvision
from module_save import *
# 方式1,加载模型
model1 = torch.load("vgg16_method1.pth")
print(model1)
# 方式2,加载模型
vgg16 = torchvision.models.vgg16(weights='IMAGENET1K_V1')
vgg16.load_state_dict(torch.load("vgg16_method2.pth"))
print(vgg16)
# 方式1 存在的陷阱
model_tudui = torch.load("tudui_method1.pth")
print(model_tudui)
18.GPU训练模型
CPU训
-
准备数据集
-
用DataLoader加载数据
-
创建网络模型
-
设置损失函数
-
设置优化器
-
开始训练
-
model.train()
-
训练步骤
模型输出
优化器优化:梯度归零;反向传播;optimizer.step();
-
测试步骤 with torch.no_grade():
计算loss和accuracy accuracy = (outputs.argmax(1) == targets).sum()
-
code eg.
model.py
"""
@Author: LiJie
@FileName: model.py
@DateTime: 2024/7/16 下午7:23
"""
import torch
from torch import nn
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.model = nn.Sequential(
nn.Conv2d(3, 32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2, stride=2),
nn.Conv2d(32, 32, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2, stride=2),
nn.Conv2d(32, 64, kernel_size=5, stride=1, padding=2),
nn.MaxPool2d(2, stride=2),
nn.Flatten(),
nn.Linear(64 * 4 * 4, 64),
nn.Linear(64, 10),
)
def forward(self, x):
x = self.model(x)
return x
if __name__ == '__main__':
tudui = Tudui()
input = torch.ones((64, 3, 32, 32))
output = tudui(input)
print(output.shape)
train.py
"""
@Author: LiJie
@FileName: train.py
@DateTime: 2024/7/16 下午7:21
"""
import torch
from torch import nn
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from model import *
# 数据集
train_set = torchvision.datasets.CIFAR10(root='../data2', train=True, download=True,
transform=torchvision.transforms.ToTensor())
test_set = torchvision.datasets.CIFAR10(root='../data2', train=False, download=True,
transform=torchvision.transforms.ToTensor())
# 数据集长度
train_data_len = len(train_set)
test_data_len = len(test_set)
print("训练数据集长度:{}".format(train_data_len))
print("测试数据集长度:{}".format(test_data_len))
# DataLoader加载数据集
train_dataloader = DataLoader(train_set, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_set, batch_size=64, shuffle=True)
# 创建网络模型
tudui = Tudui()
# 损失函数
loss_fn = nn.CrossEntropyLoss()
# 优化器
learning_rate = 0.01 # 学习率
optimizer = torch.optim.SGD(tudui.parameters(), lr=learning_rate)
# 训练参数设置
total_train_step = 0 # 训练次数记录
total_test_step = 0 # 测试次数记录
epochs = 10 # 训练轮数
# 添加TensorBoard,观察loss和accuracy
writer = SummaryWriter('../logs_train')
# 开始训练
for epoch in range(epochs):
print("==========epoch:{}==========".format(epoch))
# 训练步骤
tudui.train()
for data in train_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
# 优化器优化模型
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step, loss.item()))
writer.add_scalar('train_loss', loss.item(), total_train_step)
# 测试步骤
tudui.eval()
total_test_loss = 0
total_accuracy = 0
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy.item()
print("测试集的Loss:{}".format(total_test_loss))
print("测试集的正确率:{}".format(total_accuracy/test_data_len))
writer.add_scalar('test_loss', total_test_loss, total_test_step)
writer.add_scalar('test_accuracy', total_accuracy/test_data_len, total_test_step)
total_test_step += 1
torch.save(tudui, "tudui_{}.pth".format(epoch))
print("model saved")
writer.close()用GPU训练
方法一:
可加速对象:
网络模型;
loss function;
训练时的数据和测试时的数据。
if torch.cuda.is_available():
zz = zzz.cuda()测试代码:
"""
@Author: LiJie
@FileName: train.py
@DateTime: 2024/7/16 下午7:21
"""
import torch
from torch import nn
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
from model import *
# 数据集
train_set = torchvision.datasets.CIFAR10(root='../data2', train=True, download=True,
transform=torchvision.transforms.ToTensor())
test_set = torchvision.datasets.CIFAR10(root='../data2', train=False, download=True,
transform=torchvision.transforms.ToTensor())
# 数据集长度
train_data_len = len(train_set)
test_data_len = len(test_set)
print("训练数据集长度:{}".format(train_data_len))
print("测试数据集长度:{}".format(test_data_len))
# DataLoader加载数据集
train_dataloader = DataLoader(train_set, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_set, batch_size=64, shuffle=True)
# 创建网络模型
tudui = Tudui()
if torch.cuda.is_available():
tudui = tudui.cuda()
# 损失函数
loss_fn = nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_fn = loss_fn.cuda()
# 优化器
learning_rate = 0.01 # 学习率
optimizer = torch.optim.SGD(tudui.parameters(), lr=learning_rate)
# 训练参数设置
total_train_step = 0 # 训练次数记录
total_test_step = 0 # 测试次数记录
epochs = 10 # 训练轮数
# 添加TensorBoard,观察loss和accuracy
# writer = SummaryWriter('../logs_train')
start_time = time.time()
# 开始训练
for epoch in range(epochs):
print("==========epoch:{}==========".format(epoch))
# 训练步骤
tudui.train()
for data in train_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
# 优化器优化模型
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
end_time = time.time()
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step, loss.item()))
print("训练时间:{}".format(end_time - start_time))
# writer.add_scalar('train_loss', loss.item(), total_train_step)
# 测试步骤
tudui.eval()
total_test_loss = 0
total_accuracy = 0
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy.item()
print("测试集的Loss:{}".format(total_test_loss))
print("测试集的正确率:{}".format(total_accuracy / test_data_len))
# writer.add_scalar('test_loss', total_test_loss, total_test_step)
# writer.add_scalar('test_accuracy', total_accuracy / test_data_len, total_test_step)
total_test_step += 1
# torch.save(tudui, "tudui_{}.pth".format(epoch))
# print("model saved")
# writer.close()
方法二:
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
zzz = zzz.to(device)测试代码:
"""
@Author: LiJie
@FileName: train_gpu2.py
@DateTime: 2024/7/16 下午8:23
"""
"""
@Author: LiJie
@FileName: train.py
@DateTime: 2024/7/16 下午7:21
"""
import torch
from torch import nn
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from model import *
# 定义训练设备
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# 数据集
train_set = torchvision.datasets.CIFAR10(root='../data2', train=True, download=True,
transform=torchvision.transforms.ToTensor())
test_set = torchvision.datasets.CIFAR10(root='../data2', train=False, download=True,
transform=torchvision.transforms.ToTensor())
# 数据集长度
train_data_len = len(train_set)
test_data_len = len(test_set)
print("训练数据集长度:{}".format(train_data_len))
print("测试数据集长度:{}".format(test_data_len))
# DataLoader加载数据集
train_dataloader = DataLoader(train_set, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_set, batch_size=64, shuffle=True)
# 创建网络模型
tudui = Tudui()
tudui = tudui.to(device)
# 损失函数
loss_fn = nn.CrossEntropyLoss()
loss_fn = loss_fn.to(device)
# 优化器
learning_rate = 0.01 # 学习率
optimizer = torch.optim.SGD(tudui.parameters(), lr=learning_rate)
# 训练参数设置
total_train_step = 0 # 训练次数记录
total_test_step = 0 # 测试次数记录
epochs = 10 # 训练轮数
# 添加TensorBoard,观察loss和accuracy
# writer = SummaryWriter('../logs_train')
# 开始训练
for epoch in range(epochs):
print("==========epoch:{}==========".format(epoch))
# 训练步骤
tudui.train()
for data in train_dataloader:
imgs, targets = data
imgs, targets = imgs.to(device), targets.to(device)
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
# 优化器优化模型
optimizer.zero_grad()
loss.backward()
optimizer.step()
total_train_step += 1
if total_train_step % 100 == 0:
print("训练次数:{},Loss:{}".format(total_train_step, loss.item()))
# writer.add_scalar('train_loss', loss.item(), total_train_step)
# 测试步骤
tudui.eval()
total_test_loss = 0
total_accuracy = 0
with torch.no_grad():
for data in test_dataloader:
imgs, targets = data
imgs, targets = imgs.to(device), targets.to(device)
outputs = tudui(imgs)
loss = loss_fn(outputs, targets)
total_test_loss += loss.item()
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy += accuracy.item()
print("测试集的Loss:{}".format(total_test_loss))
print("测试集的正确率:{}".format(total_accuracy/test_data_len))
# writer.add_scalar('test_loss', total_test_loss, total_test_step)
# writer.add_scalar('test_accuracy', total_accuracy/test_data_len, total_test_step)
total_test_step += 1
torch.save(tudui, "tudui_{}.pth".format(epoch))
print("model saved")
# writer.close()______to be update